Background
- We need to build dense walking/cycling/wheeling networks
- But where?

Source: Cycle Routing Uptake and Scenario Estimation (CRUSE) tool
Tools of the trade
![]()

Tools of the trade
![]()
![]()

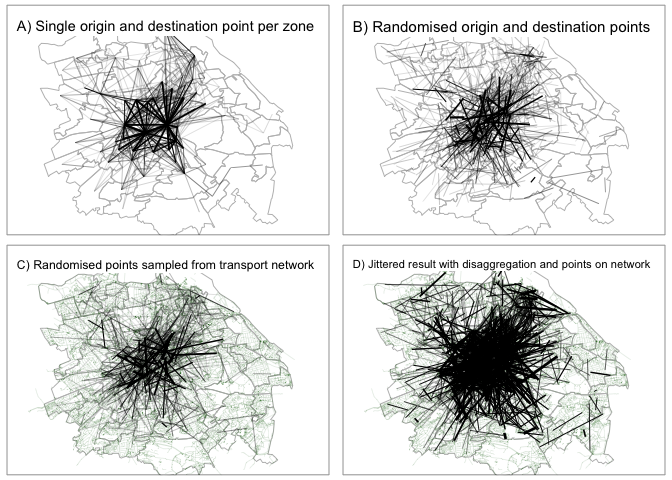
 Source: Morgan and Lovelace (
Source: Morgan and Lovelace (
What is Jittering?

Source: Lovelace, R., Félix, R., & Carlino, D. (2022, January 13). Jittering: A computationally efficient method for generating realistic route networks from origin-destination data. Transport Findings, in Press https://doi.org/10.31219/osf.io/qux6g
Current default: centroid-based desire lines (+routes+rnets)

Jittering in action: minimal reproducible example

Jittering a larger dataset
Adding value and detail to existing OD data. Source: Lovelace, Félix and Carlino (2022)
Resulting route network

Validating the approach: MKI
Data from Edinburgh. Source: GISRUK 2022 conference paper.

See slides here
Model experiments: jittering parameters

Results From Edinburgh

Changing jittering and routing params
The 'jittering only' approach is assumes perfect routing, not true
Model/data discrepancies may be more due to routing than jittering/OD parameters
Enter Lisbon!

Network level results

Summary of results

Plot of unjittered data
library(dplyr)plot(od_sf$geometry, lwd = od_sf$all / 500)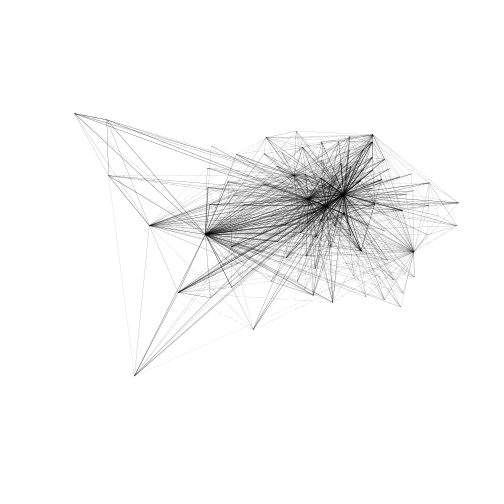
Results of reprex 2
plot(od_jittered$geometry, lwd = od_jittered$all / 500)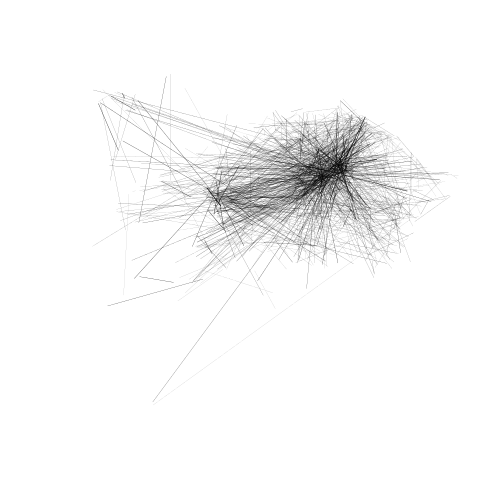
Results of reprex 3
plot(od_jittered2$geometry, lwd = od_jittered2$all / 50)
Alternative validation datasets: OA-WPZ data
There are 17,848,366 OA to WPZ records, 170k OAs, 54k WPZ
For 5km buffer around London, 1.5 million OD pairs with destinations

Reproducible example
u = "https://github.com/ITSLeeds/od/releases/download/v0.3.1/od_intra_top_sf.geojson"desire_lines_oa_wpz_1k = sf::read_sf(u)oas_in_buffer = sf::read_sf("https://github.com/ITSLeeds/od/releases/download/v0.3.1/oas_in_buffer.geojson")wpz_in_buffer = sf::read_sf("https://github.com/ITSLeeds/od/releases/download/v0.3.1/wpz_in_buffer.geojson")library(tmap)tmap_mode("view")## tmap mode set to interactive viewingm = tm_shape(desire_lines_oa_wpz_1k) + tm_lines() + tm_shape(oas_in_buffer) + tm_dots(col = "darkgreen") + tm_shape(wpz_in_buffer) + tm_dots(col = "darkred")See here for map
